Projects
Projects
My portfolio of projects I have worked on during my education and professional experience. My work combines mechanical design, software development and systems engineering.
Autonomous Rover - Learning-Adaptive Control Research
Learning-Based Adaptive Control for Autonomous Mobile Robots
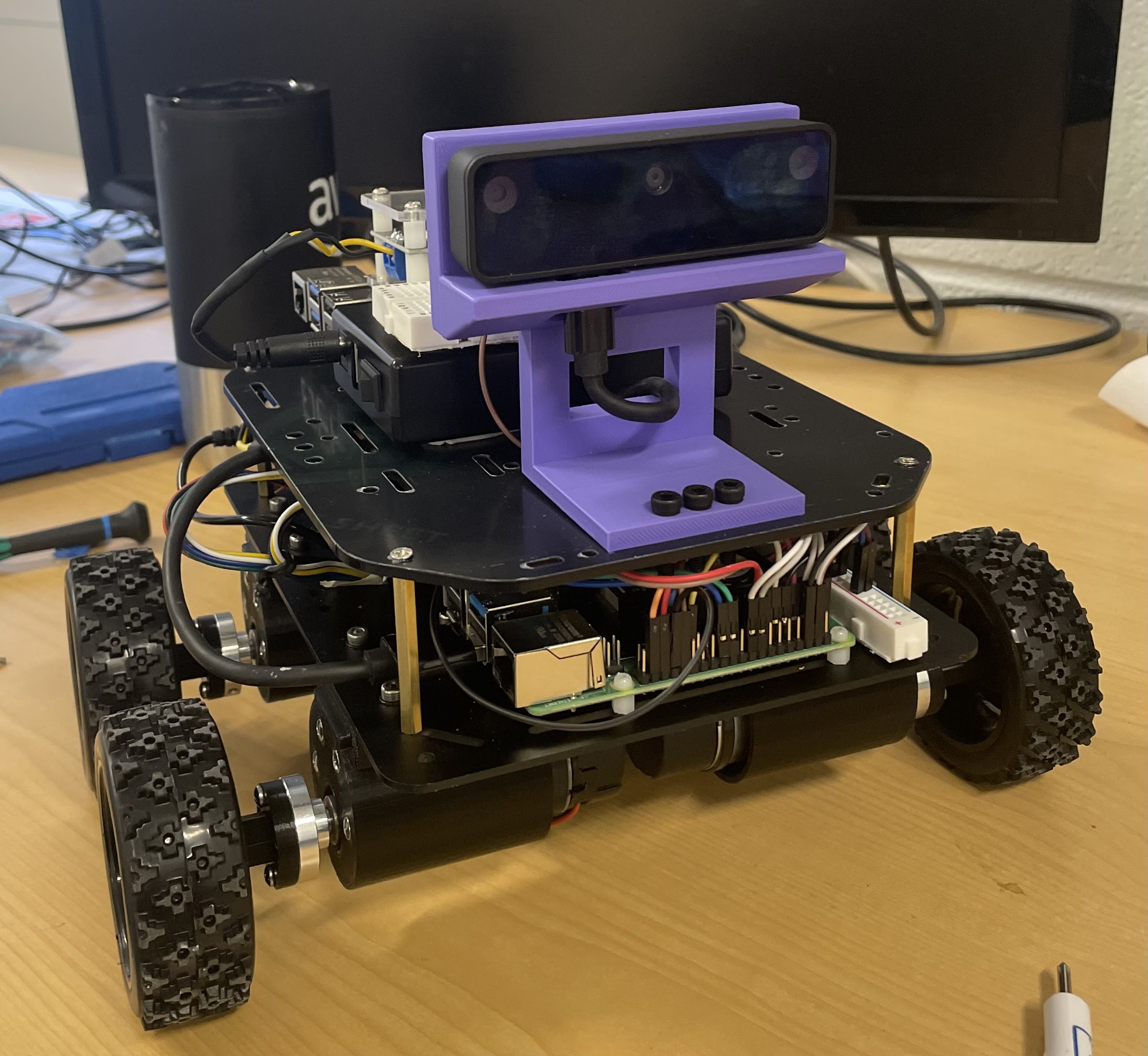
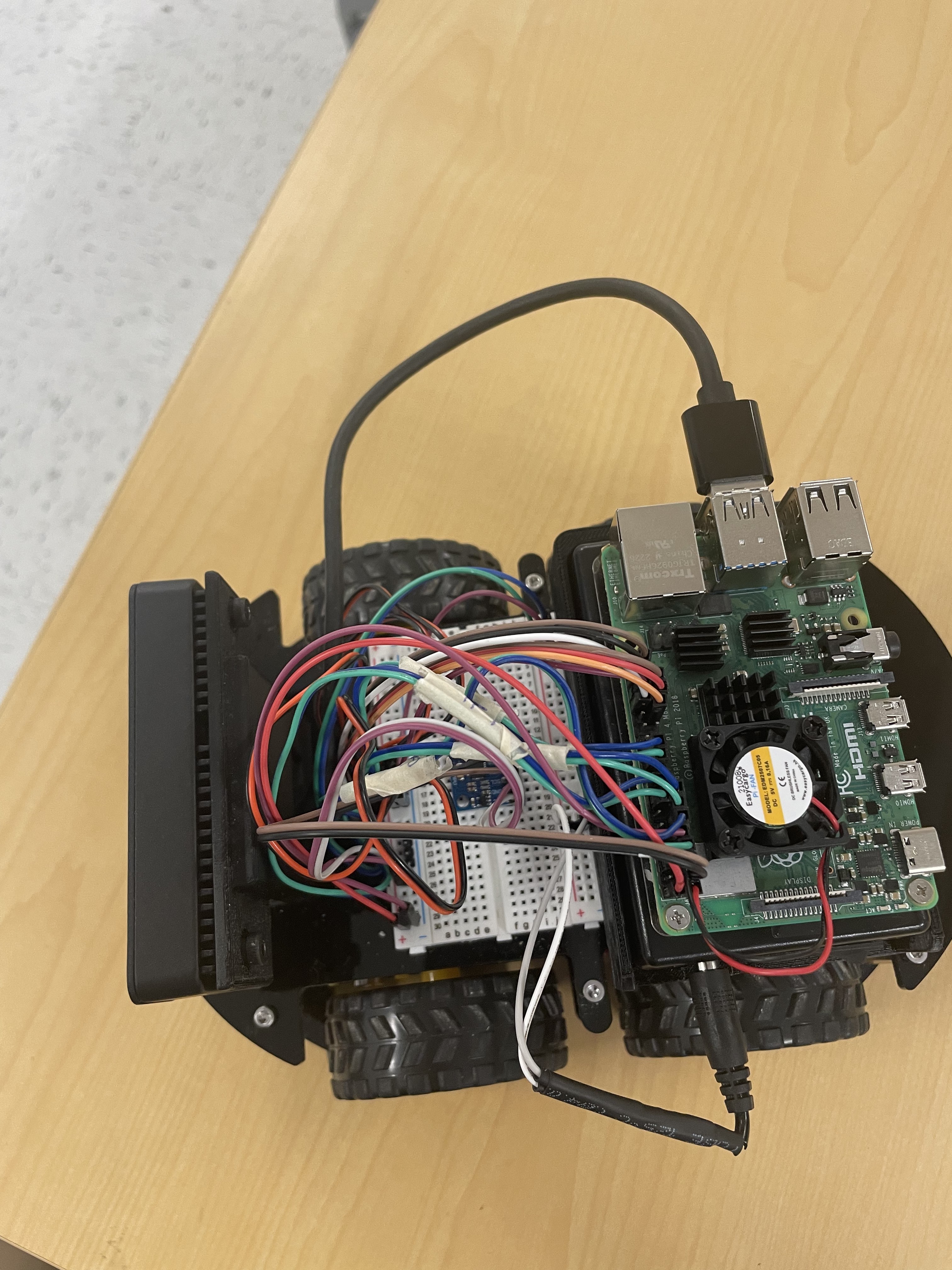
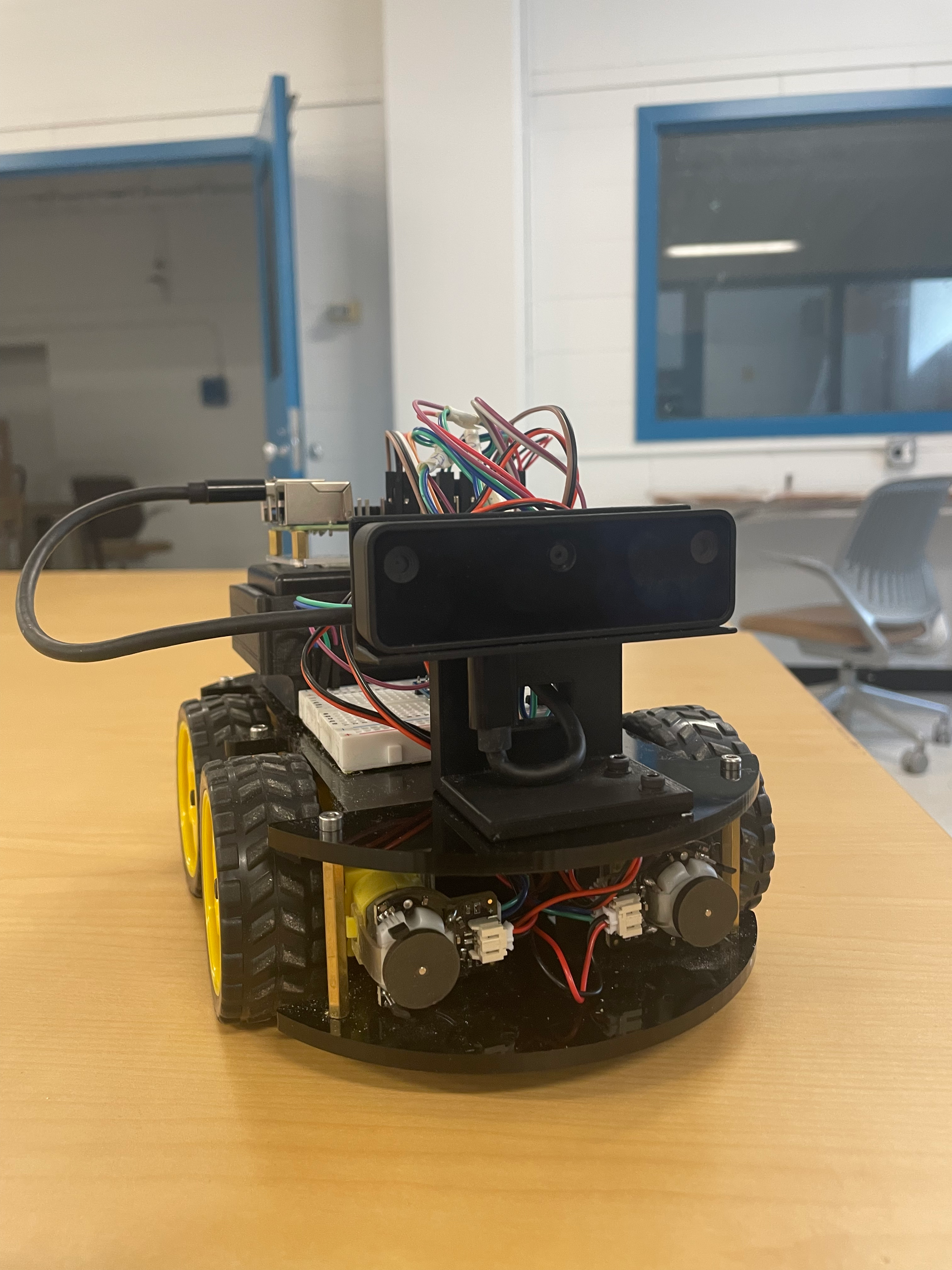
This research project implements learning-adaptive control strategies for autonomous mobile robots in repetitive environments, supervised by Dr. Homayoon Beigi at Columbia's Nonlinear Adaptive Control Research Lab. The custom-built differential drive AMR features a distributed architecture with dual Raspberry Pi units; Pi4 handling hardware control through a custom ROS2 Control plugin and sensor management, while Pi5 executes motion planning via a specialized Nav2 controller plugin that implements the learning-adaptive algorithm.
By bridging theoretical adaptive control concepts with real-world autonomous navigation, this project demonstrates how robots can intelligently improve their performance through experience in structured environments. The learning-adaptive approach is particularly valuable for AMRs in warehouses, manufacturing facilities, or delivery systems where robots follow similar routes repeatedly, allowing them to optimize their control strategies and achieve superior trajectory tracking performance over time.
Other Projects
DiffDrivePi - ROS2 Control Hardware Plugin
Differential Drive Hardware Interface Plugin for Raspberry Pi4
A flexible C++ library designed as a ROS2 Control hardware interface plugin for differential drive mobile robots, offering hardware abstraction for and a clean interface. DiffDrivePi features implementations of arbitrary DC motor control through H-bridge setups, thread free velocity calculation from quadrature encoders, and PID velocity control .
The library features the AutonomousRover plugin implementation with comprehensive configurability for diverse robotic applications using Raspberry Pi4. The library is built using the Pigpio library, and a script is included to install pigpio alongside the source code.

MPC-ISM Controller for 3 DOF Robot Manipulator
Model Predictive and Sliding Mode Controllers on MATLAB
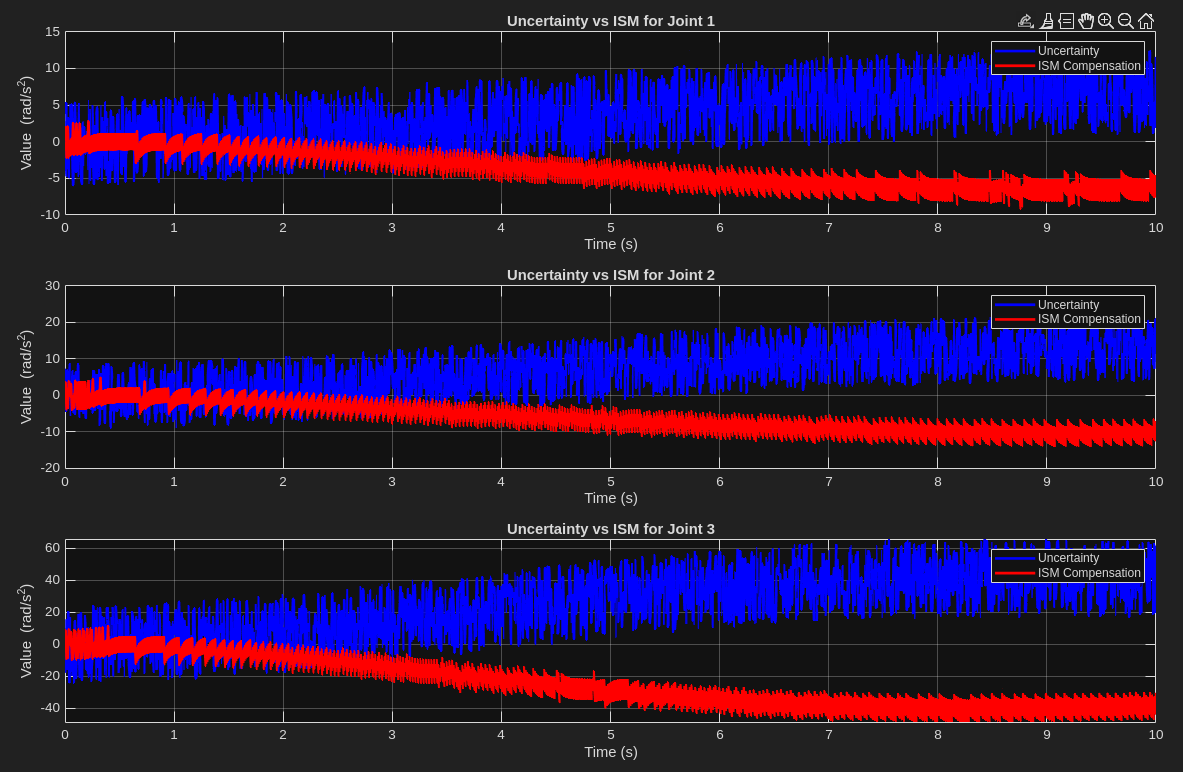
This project implements a hierarchical control system for a 3-DOF robot manipulator by combining Model Predictive Control (MPC) with Integral Sliding Mode (ISM) control, based on an IEEE paper by Incremona et al.
The system features a three-layer architecture: inverse dynamics linearization, high-frequency ISM for uncertainty rejection, and MPC for optimal trajectory tracking with constraints. The implementation was developed in MATLAB with custom classes for robot dynamics, controllers, and simulation.
ROS2 Common Robotics Algorithms
Inverse Kinematics Control - RRT Path Planning - Extended Kalman Filter
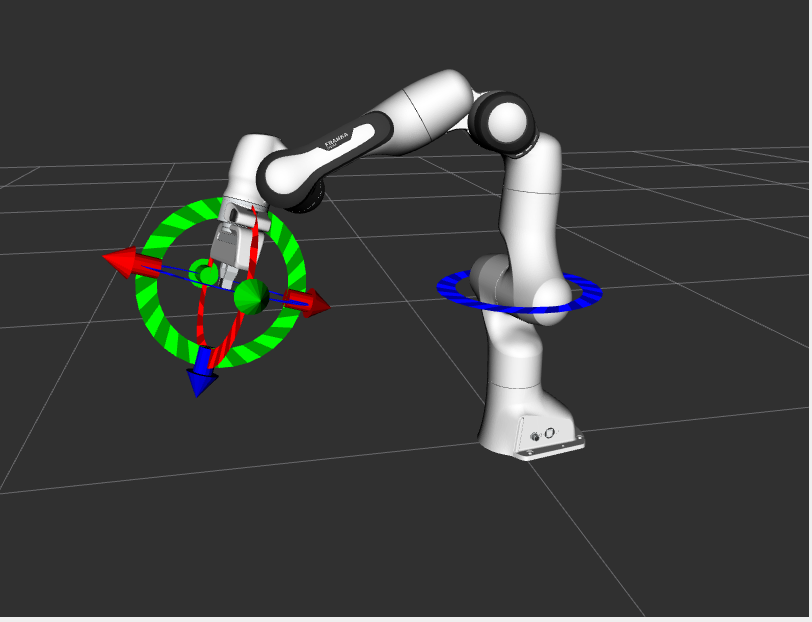
As part of MECS4603 Applied Robotics Algorithms course, three commonly used robotics algorithms were implemented on ROS2.
First is a Cartesian and Inverse Kinematics Based Controller for a Franka Panda 7 DOF Robotic Manipulator. The interactive rings around the end effector of the robot allows for position control through Jacobian Inverse Control.
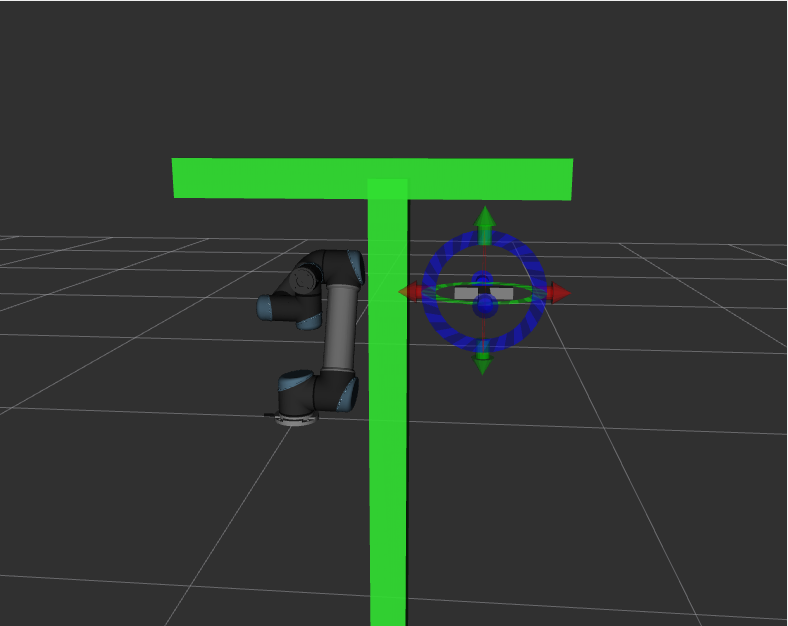
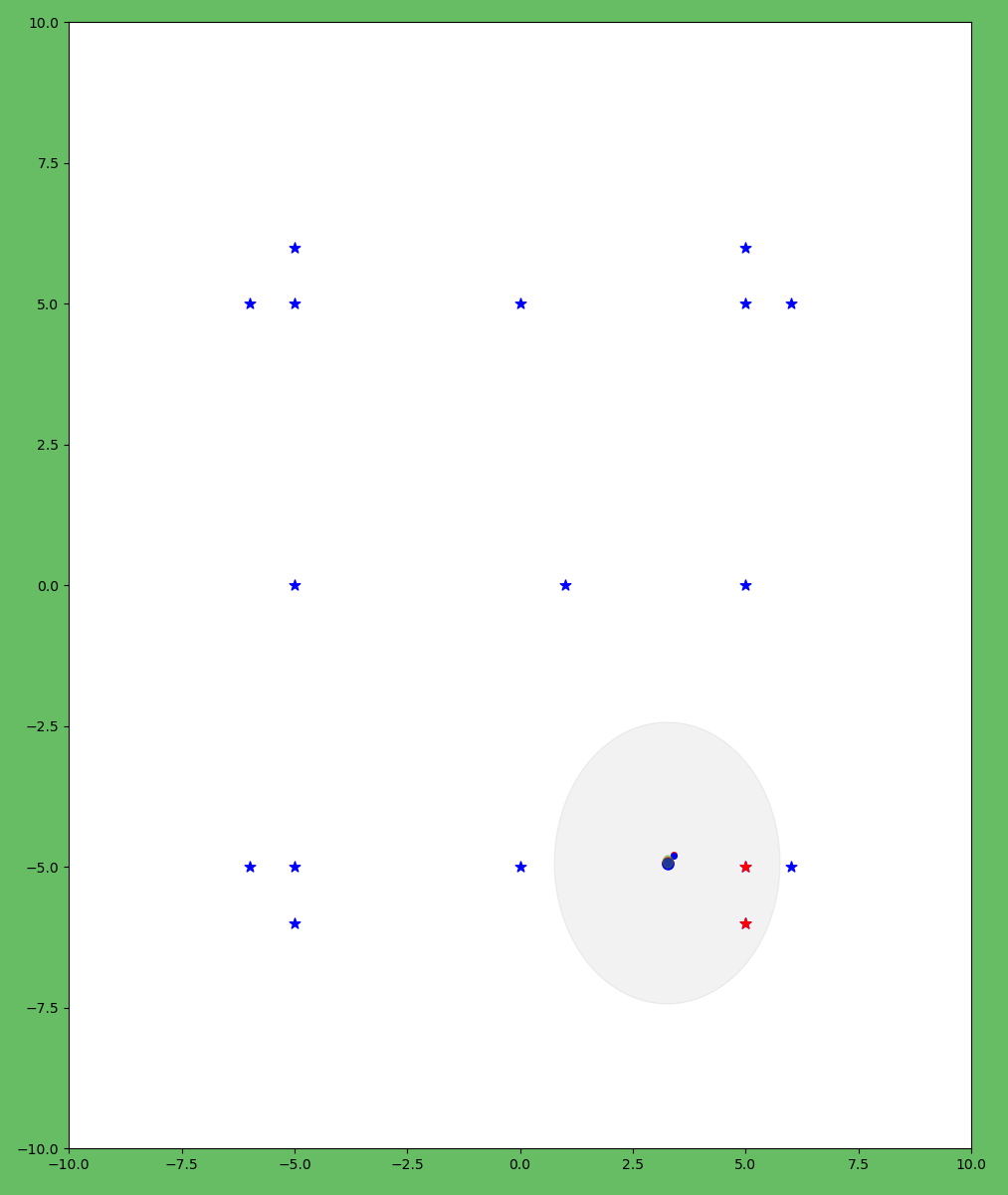
Next is a RRT Based Path planning algorithm for the UR5 Robot Manipulator, which calculates a collision free path for the robot to travel from an initial point to the goal point. The last is Extended Kalman Filter for a 2D mobile robot which uses nearby landmark positions for absolute localization.

Automated Pill Dispenser - UCLA Capstone
CAD Design & Manufacturing & Mechatronics
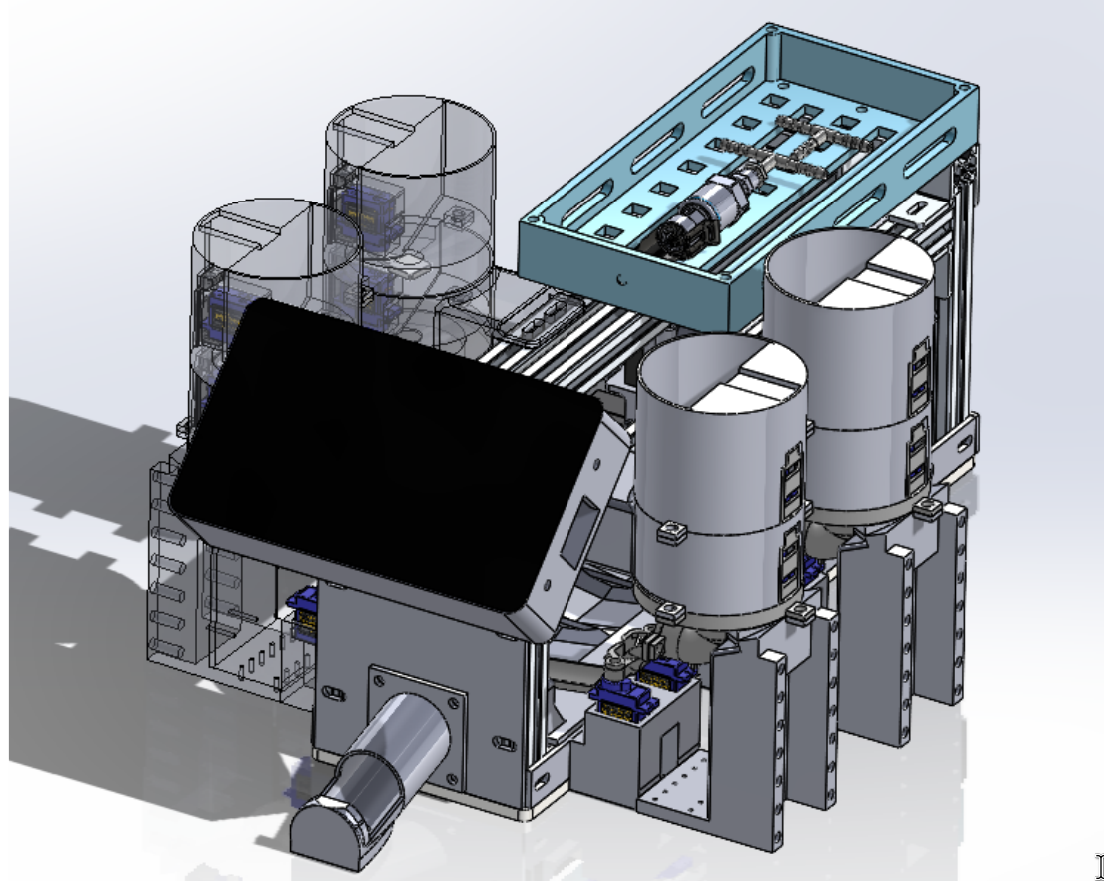
Designed and prototyped a low-cost, user-friendly automated pill dispenser for elderly users to improve medication adherence. Implemented a triple-latch redundant filtration system for precise single-pill dispensing.
Achieved 95% pill dispensing reliability for varying pill sizes (1mm to 10mm). Delivered a fully functional prototype under a $500 budget, incorporating a modular design with a user-friendly Raspberry Pi interface.
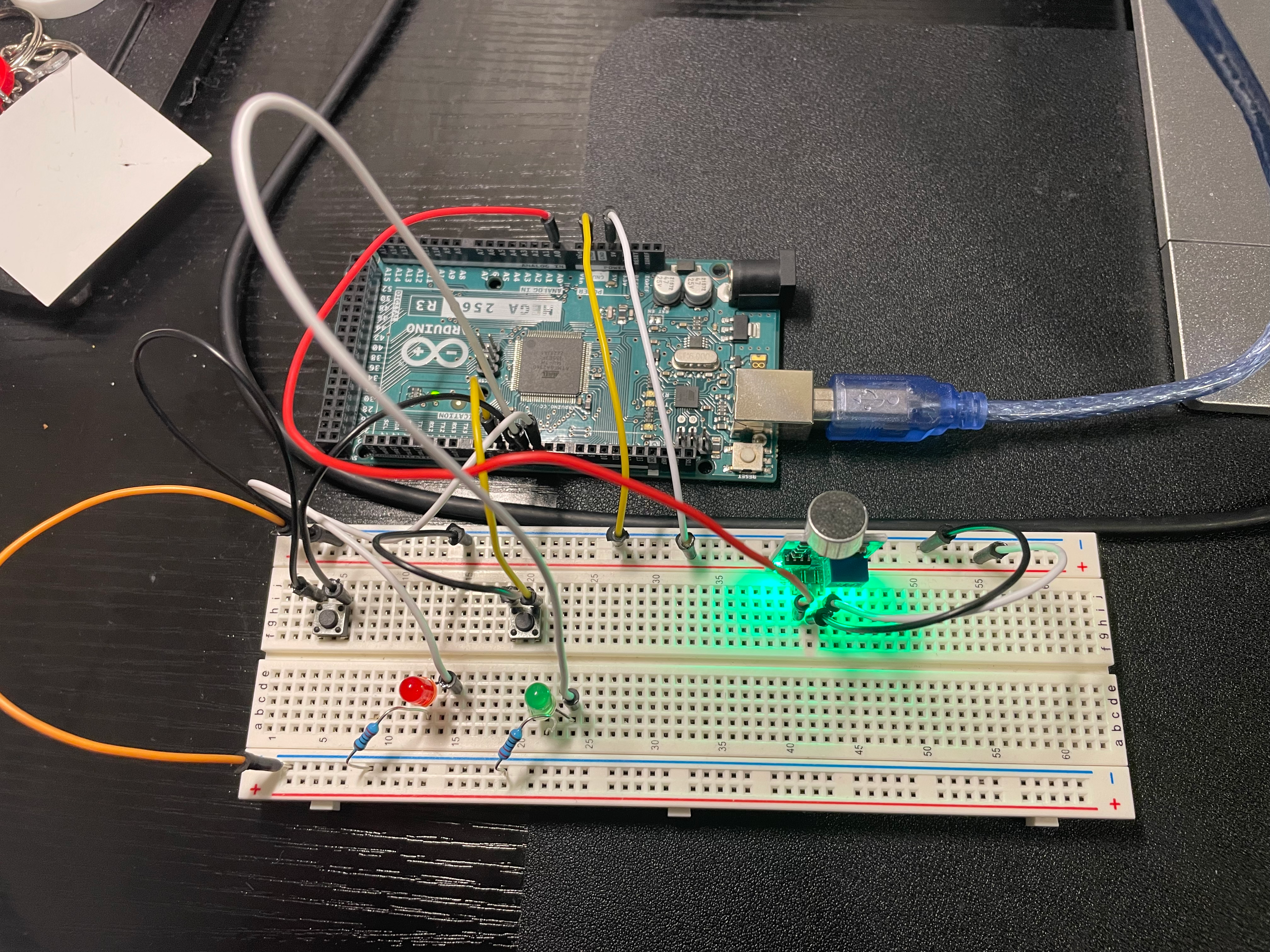
Sound Driven Password Lock Utilizing FFT
Frequency Domain Analysis and Circuits
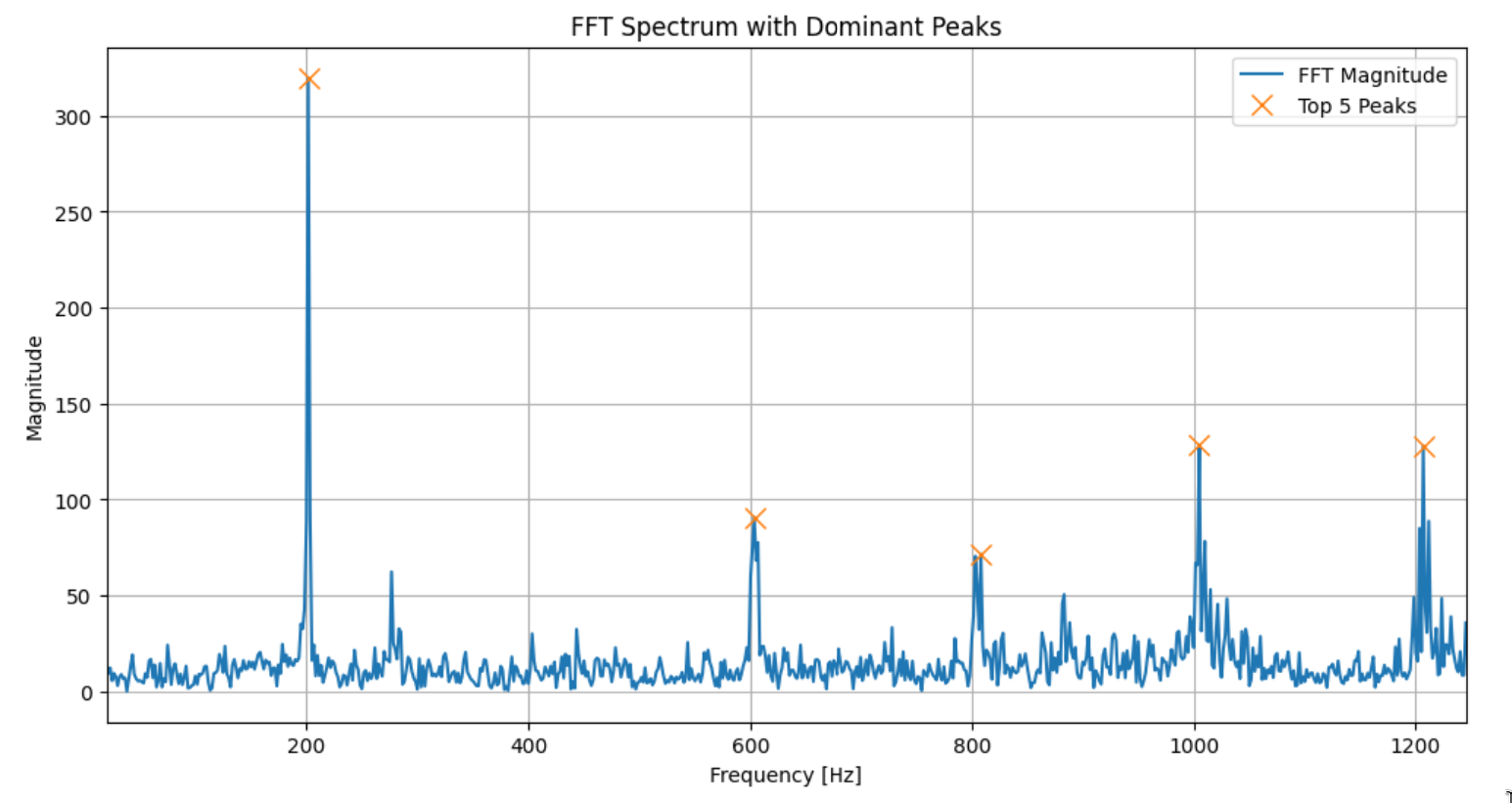
Developed a sound-driven password lock using Fast Fourier Transform (FFT) technology to analyze and match dominant sound frequencies for access control.
Calibrated the system to identify and store the five most dominant sound frequencies as a password array, incorporating a ±5 Hz tolerance range. Achieved reliable password matching for continuous sound signals with a success rate of 90%, despite limitations in memory resources.
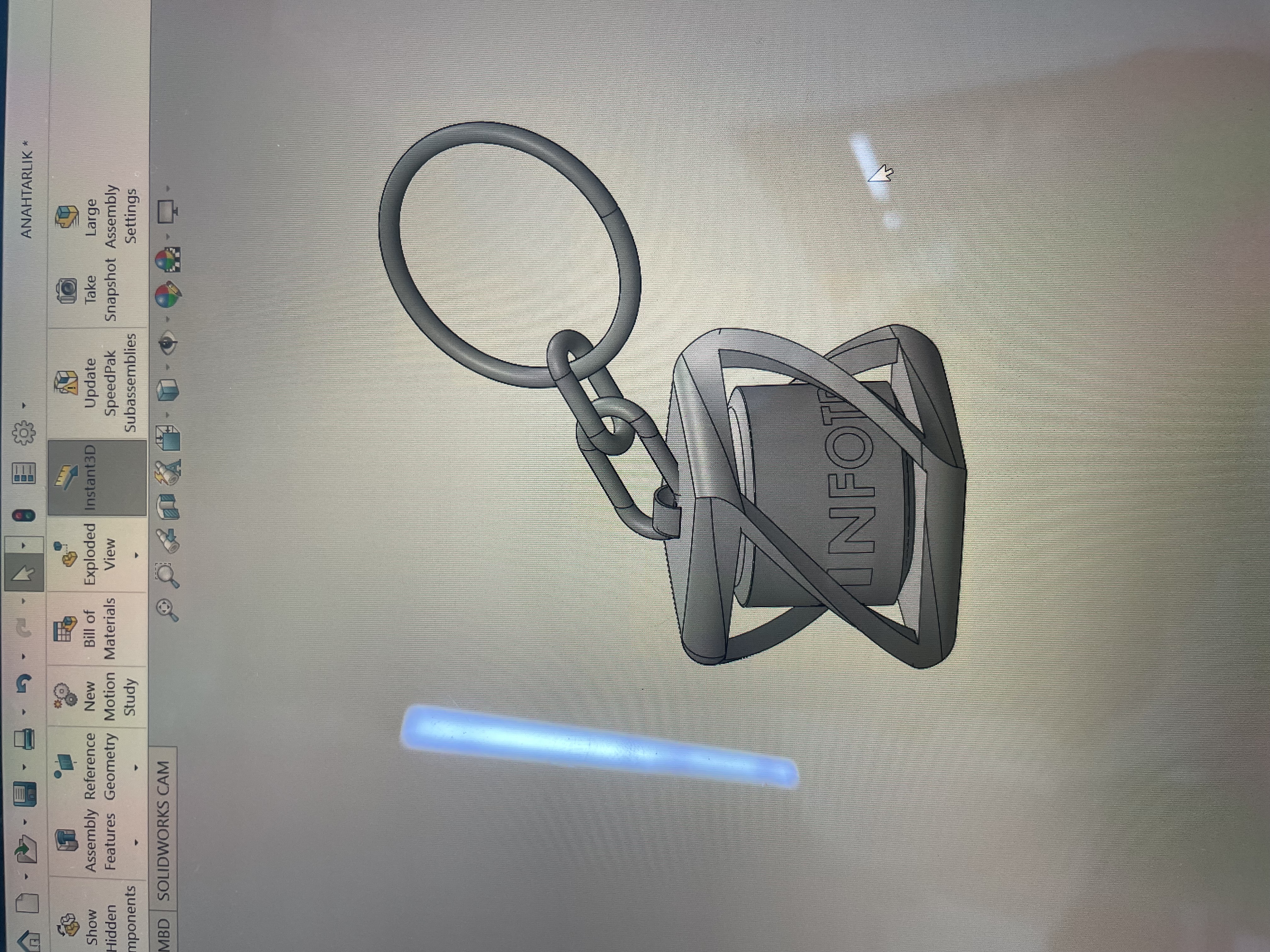

SLS Printing Demo Keychain - +90 3D Digital Factory
Additive Manufacturing & Rapid Prototyping
Designed and manufactured a custom keychain in SolidWorks to showcase design capabilities and effective use of 3D printing technology, incorporating detailed features such as custom text and geometric design for aesthetic appeal.
Printed using the Stratasys H350 SAF printer, ensuring precise layer adhesion and structural integrity. Performed smoothing, sanding, and polishing to ensure a high-quality finish.